
การใช้งาน LoRaWan Node ATmega1284 V.1.0
7 ปีที่ผ่านมา

เตรียม Arduino IDE
ดูวิธีการ คร่าวๆ คล้ายกับรุ่น Arduino Pro Mini โดยศึกษาได้จาก Link
ลง LMIC 923Mhz Lib จาก Link
ลง Low Power Lib Link
เพิ่ม mighty core board จาก GitHub ดูวิธีจาก Link
ลง Library Sensor ต่างๆ
[การ Complie หากขึ้น Error ว่าหา Include XXX.h ไม่เจอน่าจะมาจากสาเหตุติดตั้ง Library ไม่ครบ
การเพิ่ม Library ด้วยเมนูใน IDE ให้ทำดังนี้
เข้า Github ไปที่ Library ที่ต้องการ จากที่ Link ไว้ให้ด้านบน แล้ว Click Download บริเวณมุมขวาบน จะได้ ไฟล์ .zip มาให้เพิ่มโดย
เมนู Sketch, Include Library, Add .zip Library]
ใช้ Sketch Gen Link
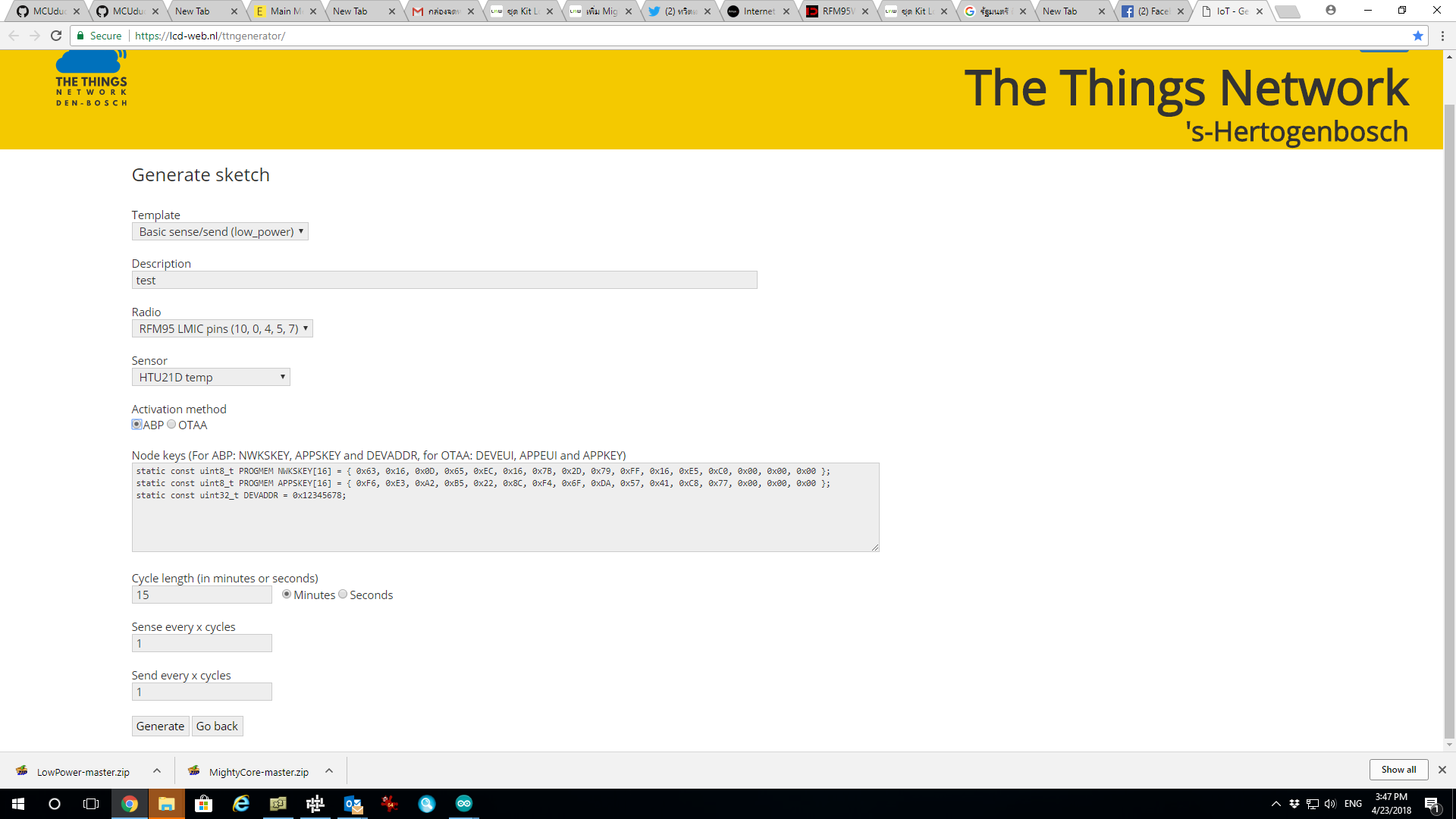
เปิด Sketch .ino แก้ไข Pin Map เป็น
แก้ไข NWKSKEY[16]
APPSKEY[16]
DEVADDR ให้ตรงกับที่ลงทะเบียนไว้ที่ TTN
const lmic_pinmap lmic_pins = {
.nss = 14,
.rxtx = LMIC_UNUSED_PIN,
.rst = LMIC_UNUSED_PIN,
.dio = { 12, 13, 15 },
};
แก้ไข NWKSKEY[16]
APPSKEY[16]
DEVADDR ให้ตรงกับที่ลงทะเบียนไว้ที่ TTN
/* **************************************************************
* Arduino sketch
* Author: Martijn Quaedvlieg / Jan de Laet (january 2017)
* Generated with Generate script by Jan de Laet
*
* *************************************************************/
#include
// define the activation method ABP or OTAA
#define ACT_METHOD_ABP
// show debug statements; comment next line to disable debug statements
#define DEBUG
/* **************************************************************
* keys for device
* *************************************************************/
static const uint8_t PROGMEM NWKSKEY[16] = { 0xD5, 0xBB, 0xE1, 0x51, 0x8B, 0xE8, 0x68, 0x66, 0x7D, 0x71, 0xA0, 0x86, 0xBA, 0x0E, 0x01, 0xB3 };
static const uint8_t PROGMEM APPSKEY[16] = { 0x8E, 0xC3, 0x11, 0xD1, 0x17, 0xE2, 0xE2, 0x8D, 0x53, 0x65, 0xAF, 0x1B, 0xD3, 0x5D, 0x2A, 0x37 };
static const uint32_t DEVADDR = 0x26011F50;
// Uses LMIC libary by Thomas Telkamp and Matthijs Kooijman (https://github.com/matthijskooijman/arduino-lmic)
// Pin mappings based upon PCB Doug Larue
#include
#include <hal/hal.h>
// Declare the job control structures
static osjob_t sendjob;
// These callbacks are only used in over-the-air activation, so they are
// left empty when ABP (we cannot leave them out completely unless
// DISABLE_JOIN is set in config.h, otherwise the linker will complain).
#ifdef ACT_METHOD_ABP
void os_getArtEui (u1_t* buf) { }
void os_getDevEui (u1_t* buf) { }
void os_getDevKey (u1_t* buf) { }
#else
void os_getArtEui (u1_t* buf) { memcpy_P(buf, APPEUI, 8);}
void os_getDevEui (u1_t* buf) { memcpy_P(buf, DEVEUI, 8);}
void os_getDevKey (u1_t* buf) { memcpy_P(buf, APPKEY, 16);}
#endif
/* **************************************************************
* Pin mapping
* *************************************************************/
/*const lmic_pinmap lmic_pins = {
.nss = 10,
.rxtx = LMIC_UNUSED_PIN,
.rst = 0,
.dio = {4, 5, 7},
};
*/
// ATMEGA Mighty Core. lorawan.lnwshop.com
const lmic_pinmap lmic_pins = {
.nss = 14,
.rxtx = LMIC_UNUSED_PIN,
.rst = LMIC_UNUSED_PIN,
.dio = { 12, 13, 15 },
};
// HTU21D settings
#include
#include
float humd;
float temp;
// Create an instance of the object
HTU21D myHumidity;
//Sensor data
static uint8_t dataTX[3];
/* **************************************************************
* user settings
* *************************************************************/
unsigned long starttime;
unsigned long cycle_length = 7 * 1 * 1000UL; // cycle * mins_or_secs * 1000;
/* **************************************************************
* setup
* *************************************************************/
void setup() {
// Wait (max 10 seconds) for the Serial Monitor
while ((!Serial) && (millis() < 10000)){ }
//Set baud rate
Serial.begin(9600);
Serial.println(F("test (template version: 26Dec2016 generated: 25Apr2018)"));
init_node();
init_sensor();
starttime = millis();
}
/* **************************************************************
* loop
* *************************************************************/
void loop() {
do_sense();
// check if need to send
if ((millis() - starttime) > cycle_length) { build_data(); do_send(); starttime = millis(); }
}
/* **************************************************************
* sensor code, typical would be init_sensor(), do_sense(), build_data()
* *************************************************************/
/* **************************************************************
* init the sensor
* *************************************************************/
void init_sensor() {
myHumidity.begin();
}
/* **************************************************************
* do reading
* *************************************************************/
void do_sense() {
humd = myHumidity.readHumidity();
temp = myHumidity.readTemperature();
#ifdef DEBUG
Serial.print(F("Time: "));
Serial.print(millis());
Serial.print(F(" Temperature: "));
Serial.print(temp, 3);
Serial.print(F(" C: "));
Serial.print(F(" Humidity: "));
Serial.print(humd, 2);
Serial.print(F(""));
Serial.println();
#endif
}
/* **************************************************************
* build data to transmit in dataTX
* *************************************************************/
void build_data() {
//convert float to int, times 100 to keep 2 decimals)
int temp100 = (int) (temp*100);
#ifdef DEBUG
Serial.print(F("Time:"));
Serial.print(millis());
Serial.print(F(" Send Temperature:"));
Serial.print(temp100);
Serial.println();
#endif
// map it to dataTX; 1 leading byte (0x00) plus 2 data bytes
/* *************************************************
* Suggested payload function for this data
*
* if (bytes[0] == 0x00) {
* var temperature = (bytes[1] << 8) | bytes[2];
* return { payload: temperature / 100.0 };
* }
*
* ************************************************/
dataTX[0] = 0x00; //first byte is send as 00 to recognise this is a temperature in our dashboard
dataTX[1] = temp100 >> 8;
dataTX[2] = temp100 & 0xFF;
}
/* **************************************************************
* radio code, typical would be init_node(), do_send(), etc
* *************************************************************/
/* **************************************************************
* init the Node
* *************************************************************/
void init_node() {
#ifdef VCC_ENABLE
// For Pinoccio Scout boards
pinMode(VCC_ENABLE, OUTPUT);
digitalWrite(VCC_ENABLE, HIGH);
delay(1000);
#endif
// LMIC init
os_init();
// Reset the MAC state. Session and pending data transfers will be discarded.
LMIC_reset();
#ifdef ACT_METHOD_ABP
// Set static session parameters. Instead of dynamically establishing a session
// by joining the network, precomputed session parameters are be provided.
#ifdef PROGMEM
// On AVR, these values are stored in flash and only copied to RAM
// once. Copy them to a temporary buffer here, LMIC_setSession will
// copy them into a buffer of its own again.
uint8_t appskey[sizeof(APPSKEY)];
uint8_t nwkskey[sizeof(NWKSKEY)];
memcpy_P(appskey, APPSKEY, sizeof(APPSKEY));
memcpy_P(nwkskey, NWKSKEY, sizeof(NWKSKEY));
LMIC_setSession (0x1, DEVADDR, nwkskey, appskey);
#else
// If not running an AVR with PROGMEM, just use the arrays directly
LMIC_setSession (0x1, DEVADDR, NWKSKEY, APPSKEY);
#endif
#if defined(CFG_eu868)
// Set up the channels used by the Things Network, which corresponds
// to the defaults of most gateways. Without this, only three base
// channels from the LoRaWAN specification are used, which certainly
// works, so it is good for debugging, but can overload those
// frequencies, so be sure to configure the full frequency range of
// your network here (unless your network autoconfigures them).
// Setting up channels should happen after LMIC_setSession, as that
// configures the minimal channel set.
// NA-US channels 0-71 are configured automatically
LMIC_setupChannel(0, 868100000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band
LMIC_setupChannel(1, 868300000, DR_RANGE_MAP(DR_SF12, DR_SF7B), BAND_CENTI); // g-band
LMIC_setupChannel(2, 868500000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band
LMIC_setupChannel(3, 867100000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band
LMIC_setupChannel(4, 867300000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band
LMIC_setupChannel(5, 867500000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band
LMIC_setupChannel(6, 867700000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band
LMIC_setupChannel(7, 867900000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band
LMIC_setupChannel(8, 868800000, DR_RANGE_MAP(DR_FSK, DR_FSK), BAND_MILLI); // g2-band
// TTN defines an additional channel at 869.525Mhz using SF9 for class B
// devices' ping slots. LMIC does not have an easy way to define set this
// frequency and support for class B is spotty and untested, so this
// frequency is not configured here.
#elif defined(CFG_us915)
// NA-US channels 0-71 are configured automatically
// but only one group of 8 should (a subband) should be active
// TTN recommends the second sub band, 1 in a zero based count.
// https://github.com/TheThingsNetwork/gateway-conf/blob/master/US-global_conf.json
LMIC_selectSubBand(1);
#endif
// Disable link check validation
LMIC_setLinkCheckMode(0);
// TTN uses SF9 for its RX2 window.
LMIC.dn2Dr = DR_SF9;
// Set data rate and transmit power (note: txpow seems to be ignored by the library)
LMIC_setDrTxpow(DR_SF7,14);
#endif
#ifdef ACT_METHOD_OTAA
// got this fix from forum: https://www.thethingsnetwork.org/forum/t/over-the-air-activation-otaa-with-lmic/1921/36
LMIC_setClockError(MAX_CLOCK_ERROR * 1 / 100);
#endif
}
/* **************************************************************
* send the message
* *************************************************************/
void do_send() {
Serial.print(millis());
Serial.print(F(" Sending.. "));
send_message(&sendjob);
// wait for send to complete
Serial.print(millis());
Serial.print(F(" Waiting.. "));
while ( (LMIC.opmode & OP_JOINING) or (LMIC.opmode & OP_TXRXPEND) ) { os_runloop_once(); }
Serial.print(millis());
Serial.println(F(" TX_COMPLETE"));
}
/* *****************************************************************************
* send_message
* ****************************************************************************/
void send_message(osjob_t* j) {
// Check if there is not a current TX/RX job running
if (LMIC.opmode & OP_TXRXPEND) {
Serial.println(F("OP_TXRXPEND, not sending"));
} else {
// Prepare upstream data transmission at the next possible time.
LMIC_setTxData2(1, dataTX, sizeof(dataTX), 0);
Serial.println(F("Packet queued"));
}
}
/*******************************************************************************/
void onEvent (ev_t ev) {
switch (ev) {
case EV_SCAN_TIMEOUT:
Serial.println(F("EV_SCAN_TIMEOUT"));
break;
case EV_BEACON_FOUND:
Serial.println(F("EV_BEACON_FOUND"));
break;
case EV_BEACON_MISSED:
Serial.println(F("EV_BEACON_MISSED"));
break;
case EV_BEACON_TRACKED:
Serial.println(F("EV_BEACON_TRACKED"));
break;
case EV_JOINING:
Serial.println(F("EV_JOINING"));
break;
case EV_JOINED:
Serial.println(F("EV_JOINED"));
// Disable link check validation (automatically enabled
// during join, but not supported by TTN at this time).
LMIC_setLinkCheckMode(0);
break;
case EV_RFU1:
Serial.println(F("EV_RFU1"));
break;
case EV_JOIN_FAILED:
Serial.println(F("EV_JOIN_FAILED"));
break;
case EV_REJOIN_FAILED:
Serial.println(F("EV_REJOIN_FAILED"));
break;
case EV_TXCOMPLETE:
Serial.println(F("EV_TXCOMPLETE (includes waiting for RX windows)"));
if (LMIC.dataLen) {
// data received in rx slot after tx
Serial.print(F("Data Received: "));
Serial.write(LMIC.frame+LMIC.dataBeg, LMIC.dataLen);
Serial.println();
}
// schedule next transmission
// os_setTimedCallback(&sendjob, os_getTime() + sec2osticks(TX_INTERVAL), send_message);
break;
case EV_LOST_TSYNC:
Serial.println(F("EV_LOST_TSYNC"));
break;
case EV_RESET:
Serial.println(F("EV_RESET"));
break;
case EV_RXCOMPLETE:
// data received in ping slot
Serial.println(F("EV_RXCOMPLETE"));
break;
case EV_LINK_DEAD:
Serial.println(F("EV_LINK_DEAD"));
break;
case EV_LINK_ALIVE:
Serial.println(F("EV_LINK_ALIVE"));
break;
default:
Serial.println(F("Unknown event"));
break;
}
}
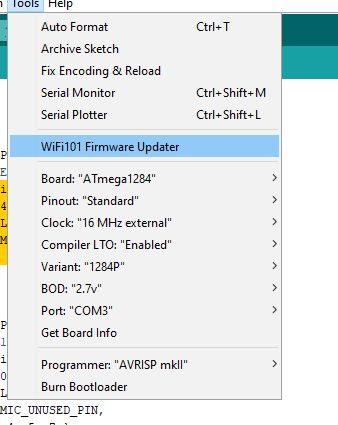
ตั้งค่า เมนู Tools ก่อนอัพโหลดดังนี้
เปิด Serial Monitor ตั้งค่า Speed ที่ 9600bps จะเห็นข้อความ เช่น
Time: 33032 Temperature: 998.000 C: Humidity: 998.00
Time: 33236 Temperature: 998.000 C: Humidity: 998.00
Time: 33441 Temperature: 998.000 C: Humidity: 998.00
Time: 33645 Temperature: 998.000 C: Humidity: 998.00
Time: 33850 Temperature: 998.000 C: Humidity: 998.00
Time: 34054 Temperature: 998.000 C: Humidity: 998.00
Time: 34258 Temperature: 998.000 C: Humidity: 998.00
Time: 34463 Temperature: 998.000 C: Humidity: 998.00
Time:34464 Send Temperature:-31272
34490 Sending.. 2156730: engineUpdate, opmode=0x808
2159444: TXMODE, freq=922200000, len=16, SF=7, BW=125, CR=4/5, IH=0
Packet queued
34566 Waiting.. 2221993: RXMODE_SINGLE, freq=922200000, SF=7, BW=125, CR=4/5, IH=0
2284781: RXMODE_SINGLE, freq=923200000, SF=9, BW=125, CR=4/5, IH=0
EV_TXCOMPLETE (includes waiting for RX windows)
2506211: engineUpdate, opmode=0x800
40119 TX_COMPLETE
วิธีใช้ขาอ่านๆตามด้านล่าง


Member
Links
▲
▼
รายการสั่งซื้อของฉัน
รายการสั่งซื้อของฉัน
ข้อมูลร้านค้านี้
lorawan
จำหน่ายอุปกรณ์ Internet of Things เน้นอุปกรณ์ด้าน LoRaWan เช่น Node หรืออุปกรณ์สำหรับการนำไปประกอบเป็น Node หรือ Gateway ในลักษณะ DIY จำหน่ายชุด KIT เพื่อใช้ในการศึกษาการทำงาน ของ LoRaWan Node และ LoRaWan Gateway
เบอร์โทร : 062-1982256
อีเมล : m2mlorawan@gmail.com
อีเมล : m2mlorawan@gmail.com
ส่งข้อความติดต่อร้าน
เกี่ยวกับร้านค้านี้
ค้นหาสินค้าในร้านนี้
ค้นหาสินค้า
สินค้าที่ดูล่าสุด
บันทึกเป็นร้านโปรด
Join เป็นสมาชิกร้าน
แชร์หน้านี้
แชร์หน้านี้
↑
TOP เลื่อนขึ้นบนสุด
TOP เลื่อนขึ้นบนสุด
สินค้าในตะกร้า ({{total_num}} รายการ)

ขออภัย ขณะนี้ยังไม่มีสินค้าในตะกร้า
ราคาสินค้าทั้งหมด
฿ {{price_format(total_price)}}
- ฿ {{price_format(discount.price)}}
ราคาสินค้าทั้งหมด
{{total_quantity}} ชิ้น
฿ {{price_format(after_product_price)}}
ราคาไม่รวมค่าจัดส่ง
➜ เลือกซื้อสินค้าเพิ่ม